角点算法是用来干嘛的?说实话我也是看到opencv的手册上写着才知道的,它的作用我也完全不知道,毕竟对图像处理这一领域接触不深,不过这并不影响我们了解这个opencv函数的使用。这两种角点算法分别是精确角点位置函数与确定图像强角点函数,下面是它们的详细介绍。

OpenCV
FindCornerSubPix
精确角点位置
void cvFindCornerSubPix( const CvArr* image, CvPoint2D32f* corners, int count, CvSize win, CvSize zero_zone, CvTermCriteria criteria );
参数介绍
- image
- 输入图像.
- corners
- 输入角点的初始坐标,也存储精确的输出坐标
- count
- 角点数目
- win
- 搜索窗口的一半尺寸。如果 win=(5,5) 那么使用 5*2+1 × 5*2+1 = 11 × 11 大小的搜索窗口
- zero_zone
- 死区的一半尺寸,死区为不对搜索区的中央位置做求和运算的区域。它是用来避免自相关矩阵出现的某些可能的奇异性。当值为 (-1,-1) 表示没有死区。
- criteria
- 求角点的迭代过程的终止条件。即角点位置的确定,要么迭代数大于某个设定值,或者是精确度达到某个设定值。 criteria 可以是最大迭代数目,或者是设定的精确度,也可以是它们的组合。
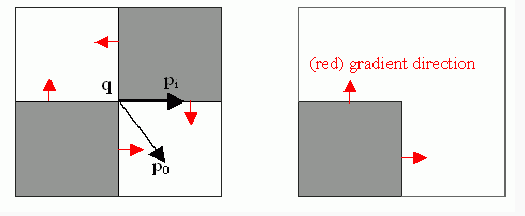
函数 cvFindCornerSubPix 通过迭代来发现具有子象素精度的角点位置,或如图所示的放射鞍点(radial saddle points)。
OpenCV两种角点函数
子象素级角点定位的实现是基于对向量正交性的观测而实现的,即从中央点q到其邻域点p 的向量和p点处的图像梯度正交(服从图像和测量噪声)。考虑以下的表达式:
εi=DIpiT•(q-pi)
其中,DIpi表示在q的一个邻域点pi处的图像梯度,q的值通过最小化εi得到。通过将εi设为0,可以建立系统方程如下:
sumi(DIpi•DIpiT)•q – sumi(DIpi•DIpiT•pi) = 0
其中q的邻域(搜索窗)中的梯度被累加。调用第一个梯度参数G和第二个梯度参数b,得到:
q=G-1•b
该算法将搜索窗的中心设为新的中心q,然后迭代,直到找到低于某个阈值点的中心位置。
GoodFeaturesToTrack
确定图像的强角点
void cvGoodFeaturesToTrack( const CvArr* image, CvArr* eig_image, CvArr* temp_image, CvPoint2D32f* corners, int* corner_count, double quality_level, double min_distance, const CvArr* mask=NULL );
参数介绍
image
输入图像,8-位或浮点32-比特,单通道
eig_image
临时浮点32-位图像,尺寸与输入图像一致
temp_image
另外一个临时图像,格式与尺寸与 eig_image 一致
corners
输出参数,检测到的角点
corner_count
输出参数,检测到的角点数目
quality_level
最大最小特征值的乘法因子。定义可接受图像角点的最小质量因子。
min_distance
限制因子。得到的角点的最小距离。使用 Euclidian 距离
mask
ROI:感兴趣区域。函数在ROI中计算角点,如果 mask 为 NULL,则选择整个图像。
函数 cvGoodFeaturesToTrack 在图像中寻找具有大特征值的角点。该函数,首先用cvCornerMinEigenVal 计算输入图像的每一个象素点的最小特征值,并将结果存储到变量 eig_image 中。然后进行非最大值抑制(仅保留3×3邻域中的局部最大值)。下一步将最小特征值小于 quality_level•max(eig_image(x,y)) 排除掉。最后,函数确保所有发现的角点之间具有足够的距离,(最强的角点第一个保留,然后检查新的角点与已有角点之间的距离大于 min_distance )。





评论 (0)