机器视觉中,引导对位的项目占据了一大半,如果不会做引导项目,就会被迫做那令人头疼的瑕疵检测与测量项目。因此如果想要进步的话,引导对位是必须掌握的技能。
群里一直有人在问视觉引导问题,群里资料那么多,就是不看,虽然那些资料不一定准确,但毕竟是前辈自己总结的经验,读一读没有坏处。
这篇文章就从头到尾讲解下机器视觉中单相机固定在机械手上,如何实现引导对位。在教程开始之前,请先下载安装Autodesk出品的计算机辅助设计软件AutoCAD。只要你不是刚刚高中毕业或者正处于高中阶段,强烈建议下载CAD辅助,不然担心你的脑子转不过来。
先看看我的抓取方案,如下图,定位点选择在左下角,抓取点为产品中随意一点,下图圆圈所在位置。
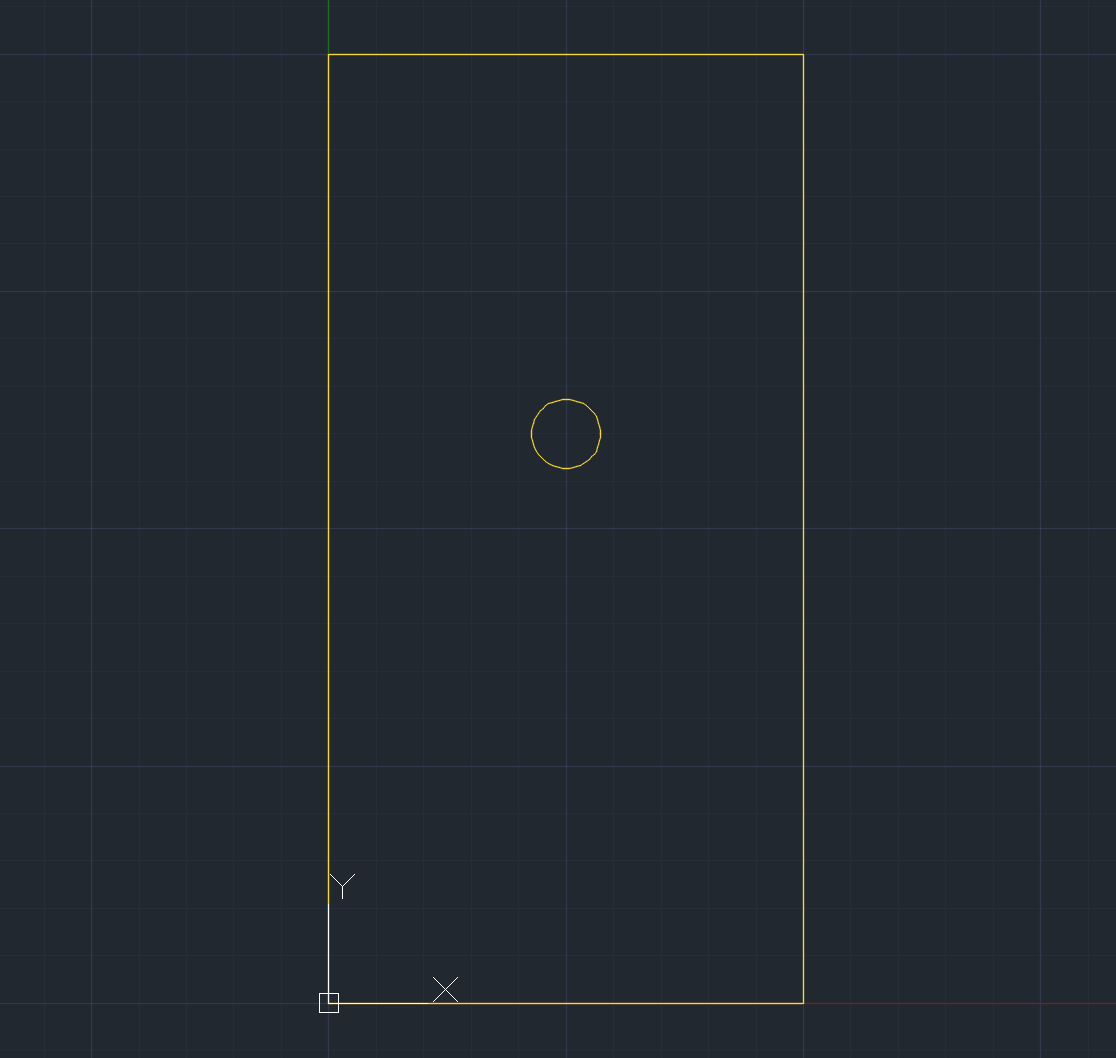
相机手爪位置
项目开始前,确定相机在手爪的哪个位置,与机械手的末端法兰存在何种关系。
本次教程的手爪垂直安装在机械手末端法兰上,相机安装在手爪边上。注意:机械手末端旋转时,相机与手爪都会旋转。
标定
标定有两个作用,一个是为了将像素坐标与机械手的坐标系对应起来,实现机械手走多少毫米,相机拍出特征也是多少毫米。另一个是为了找到机械手的末端旋转点坐标,也就是经常说的旋转中心。
九点标定
九点标定属于基础操作了,visionpro中直接拖工具填入数据即可。这里需要说明的是,使用绝对坐标,也就是机械手的坐标来标定与使用相对坐标,固定步长来标定效果是一样的,我个人喜欢使用相对坐标,原因是方便计算,且更加灵活。
旋转中心标定
旋转中心标定原理是三点确定一个圆,或者两点加角度确定圆。我个人比较喜欢使用三点确定圆,因为可以直接使用visionpro提供的拟合圆工具来实现,一行代码都不用写,非常的nice!
注意:标定旋转中心时,旋转点的角度要大于产品的最大角度,否则会导致计算的旋转中心不够准确!
计算补偿
完成上述步骤后,就到了关键步骤,计算偏移补偿。这里采用AutoCAD来辅助讲解,如下图所示。
隐藏内容,解锁需要开通VIP
登录/注册
思考
- 上述步骤是将补偿值算到拍照位置,如果想要补偿取料位置,如何计算?提示:机械手在P3点旋转后,机械手坐标不变,但产品可以旋转到平行位置,即模板产品绕P3点旋转。
- 如果相机固定,从下往上拍机械手上的产品,应该如何计算补偿?
看了这篇文章,想必困扰大家许久的引导抓取难题,应该能攻破了吧,欢迎打赏狗哥,域名被封已经很久没收入续费服务器了!





评论 (1)